diff --git a/robot/quadruped/go2.md b/robot/quadruped/go2.md
index 2215ad7..cfffd7d 100644
--- a/robot/quadruped/go2.md
+++ b/robot/quadruped/go2.md
@@ -46,6 +46,7 @@ Go2 Edu has 1 built-in computer and 1 onboard computer (expansion dock module):
* **Go2 App, Robot Features, Tutorial Videos, Manuals**: [Go2 Features](https://www.unitree.com/app/go2)
* **Other Information**: [URDF/CAD](https://support.unitree.com/home/en/developer/Obtain%20SDK)
* **Tutorials Page**: [Diagnostic Guide](/tutorial/intro)
+* **Simultaneous Localization and Mapping Guide**: [Unitree SLAM Guide](/software/slam/go2_slam)
## 4. FAQ
diff --git a/sidebars-software.ts b/sidebars-software.ts
index 6fdc681..648af31 100644
--- a/sidebars-software.ts
+++ b/sidebars-software.ts
@@ -17,7 +17,14 @@ const sidebarsSoftware: SidebarsConfig = {
'toolbox/assisted_driving_toolbox',
],
},
+ {
+ type: 'category',
+ label: 'Unitree Slam Guide',
+ items: [
+ 'slam/go2_slam',
+ ],
+ },
],
};
-export default sidebarsSoftware;
\ No newline at end of file
+export default sidebarsSoftware;
diff --git a/software/slam/go2_slam.md b/software/slam/go2_slam.md
new file mode 100644
index 0000000..21ce3f6
--- /dev/null
+++ b/software/slam/go2_slam.md
@@ -0,0 +1,212 @@
+---
+sidebar_position: 1
+---
+
+# Go2 & Go2-W
+
+## 1. Setup
+
+Before jumping into SLAM, ensure that all required configurations are set up on the User PC.
+
+### 1.1 What You Need
+
+- **User PC** running Ubuntu 20.04 or 22.04
+ - Ubuntu 22.04 is recommended.
+ - A laptop is recommended.
+ - You may refer to the [Ubuntu Installation Guide](https://ubuntu.com/tutorials/install-ubuntu-desktop).
+- **ROS2 Foxy or Humble** installed
+ - Humble is recommended.
+ - You may refer to the [ROS2 Humble Installation Guide](https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html).
+ - After installing ROS2, in the terminal, run **`export ROS_DOMAIN_ID=0`**.
+- **Unitree Software Development Kit** installed and set up
+ - You may refer to the [Unitree_SDK_Go2 Installation Guide](https://support.unitree.com/home/en/developer/Quick_start) or the [Unitree_SDK_Go2-W Installation Guide](https://support.unitree.com/home/en/Go2-W_developer/Quick_Start).
+- **Unitree ROS2 Services Interface** installed
+ - You may refer to the [ROS2 Services Interface Installation Guide](https://support.unitree.com/home/en/developer/ROS2_service).
+ - Ensure Cyclone DDS is used as the middleware.
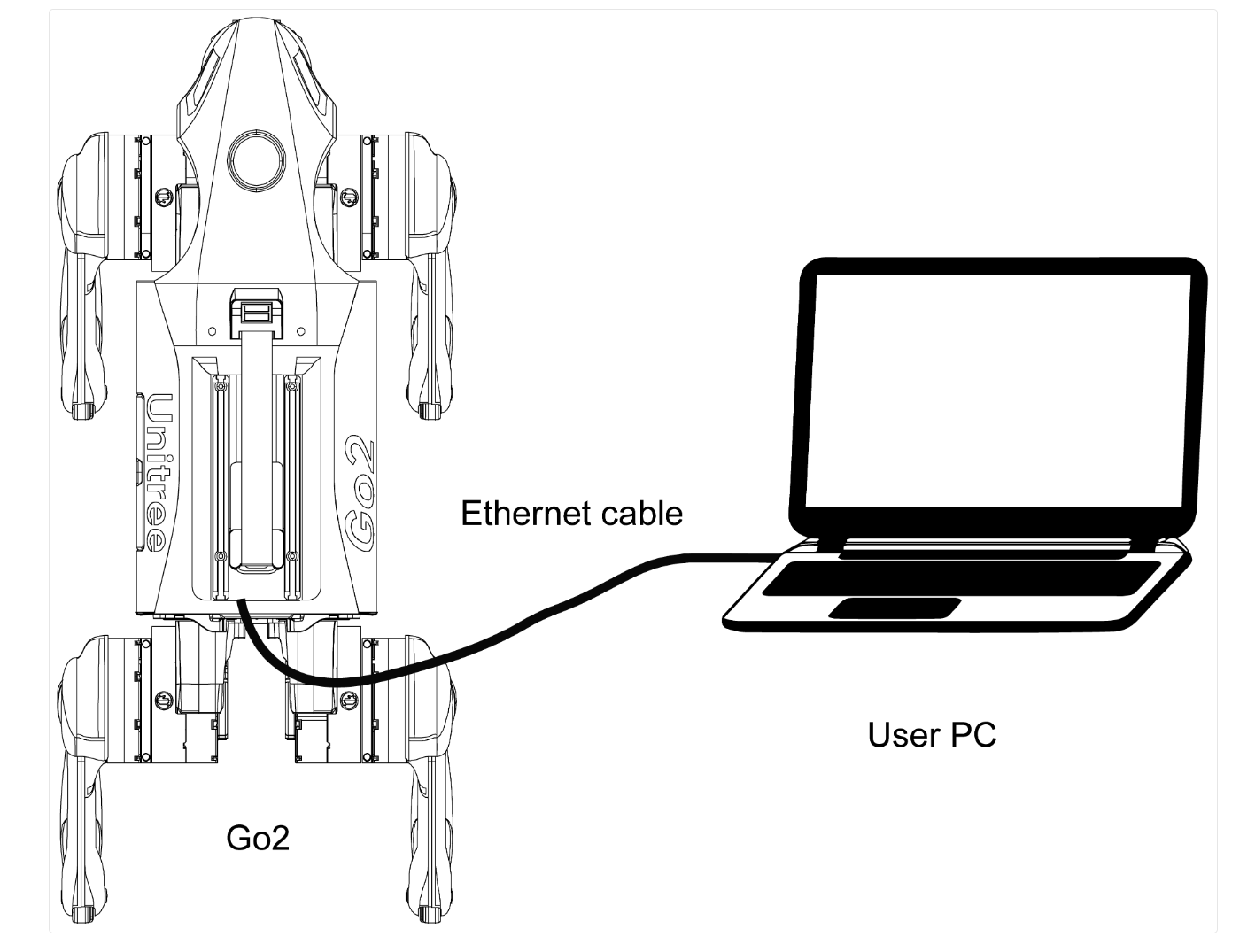
+- **Ethernet cable**
+ - Used to connect the laptop to the Robot's PC.
+ - A cable longer than 5 meters is recommended.
+
+### 1.2 Additional Preparation
+
+- **Payload Installation**
+ - You may refer to the [Payload Installation Guide](https://support.unitree.com/home/en/developer/Payload).
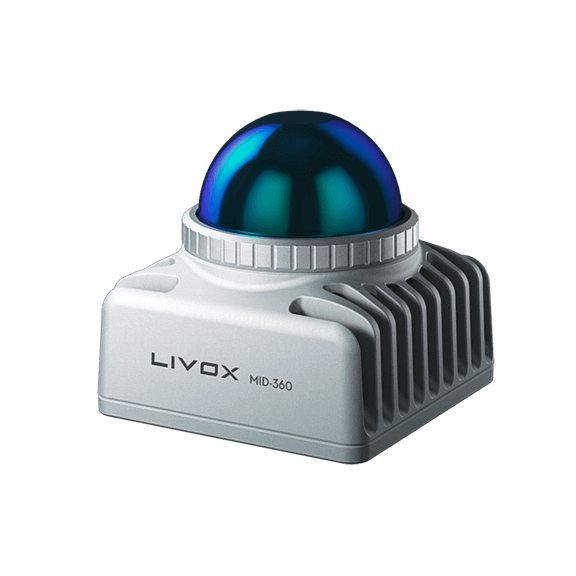
+ - Make sure the Expansion Dock and External LiDAR (XT16 or MID-360) are installed properly.
+- **SLAM Service Expansion Dock Module Update Package**
+ - You may refer to the [Expansion Dock Configuration Guide](https://support.unitree.com/home/en/developer/module_update).
+
+### 1.3 Notes
+
+- The RViz configuration files can be found in the **Expansion Dock Module Update Package** installed in the previous steps.
+- **Robot's PC details:**
+ - Username: `unitree`
+ - Password: `123`
+ - IP address: `192.168.123.18`
+- Secure Shell into the Robot's PC by running **`ssh unitree@192.168.123.18`** in the terminal.
+ - When prompted, enter the password above.
+ - Select **1** when prompted for the ROS version.
+- If you encounter issues when running commands in the terminal, try adding **`sudo`** at the front (e.g. **`sudo nano /etc/default/grub`**).
+- If you are using **ROS2 Humble** instead of **ROS2 Foxy**, replace any references to *Foxy* with *Humble* when following the steps above.
+
+---
+
+## 2. Configuration
+
+### 2.1 Wired Connection
+
+- Make sure the User PC is connected to the Expansion Dock on the Go2/Go2-W as shown below.
+
+
+- Ensure that the network interface connected to the robot is configured with the following settings.
+
+
+- In the terminal:
+ - Verify the connection by running:
+ - **`ping 192.168.123.18`** for the Robot's PC
+ - **`ping 192.168.123.20`** for the External LiDAR
+ - **`ping 192.168.123.161`** for the Motion Control PC
+ - Verify the ROS2 setup by running:
+ - **`source unitree_ros2/setup.sh`**
+ - **`ros2 topic list`**
+ - Expected output:
+ 
+
+---
+
+### 2.2 Expansion Dock Configuration for SLAM
+
+- Check that the Power Mode of the Robot's PC is set to 0:MAXN by passing the command **sudo /usr/sbin/nvpmodel -q**. If it is not the desired Power Mode, then pass the command **sudo /usr/sbin/nvpmodel -m 0** to set it.
+- Modify the Maximum Receive Buffer Size in the cyclonedds by passing the following command to the Robot's PC:
+ - **`sudo su`**
+ - **`echo "net.core.rmem_max=52428800" >> /etc/sysctl.conf`**
+ - **`echo "net.core.wmem_max=52428800" >> /etc/sysctl.conf`**
+ - **`sysctl -p`**
+ - **`exit`**
+ - **`sudo chmod 777 -R /unitree/module/unitree_slam`**
+- Make sure you have the [Unitree Software Development Kit](#12-additional-preparation) installed.
+- Make sure the [SLAM Service Expansion Dock Module Update Package](#12-additional-preparation) is installed.
+- In the User PC, clone the Unitree Software Development Kit repository.
+ - **`sudo git clone https://github.com/unitreerobotics/unitree_sdk2.git`**
+- Transfer the Software Development Kit from User PC to the Robot's PC.
+ - **`scp -r ~/unitree_sdk2 unitree@192.168.123.18:/home/unitree/`**
+- Clean, rebuild and install Unitree Software Development Kit in the Robot’s PC.
+ - **`cd /home/unitree/unitree_sdk2`**
+ - **`sudo mkdir -p build && cd build`**
+ - **`sudo cmake ..`**
+ - **`sudo make install`**
+- Build the SLAM Example
+ - **`cd /unitree/module/unitree_slam/example`**
+ - **`sudo mkdir -p build && cd build`**
+ - **`sudo cmake -Dunitree_sdk2_DIR=/home/unitree/unitree_sdk2/build/unitree_sdk2 ..`**
+ - **`sudo make`**
+
+### 2.3 LiDAR Parameter Configuration
+
+- Check for the model of the external LiDAR installed.
+
+
+
+
+
Livox LiDAR Mid-360
+
+
+
+
+
+

+
Hesai XT16 LiDAR
+
+
+