.png){kind=link}
- ROS melodic
- Used Open Source Frameworks & Libraries
- navigation
- catographer_ros
- Modify backpack_2d.lua file
num_point_clouds = 1,
- Modify backpack_2d.lua file
- darknet ros with YOLO
- Modify darknet_ros.launch file
<arg name="image" default="/main_camera/image_raw" />
- Add yolo_v2_tiny.launch
<?xml version="1.0" encoding="utf-8"?> <launch> <!-- Use YOLOv3 --> <arg name="network_param_file" default="$(find darknet_ros)/config/yolov2-tiny.yaml"/> <arg name="image" default="main_camera/image_raw" /> <!-- Include main launch file --> <include file="$(find darknet_ros)/launch/darknet_ros.launch"> <arg name="network_param_file" value="$(arg network_param_file)"/> <arg name="image" value="$(arg image)" /> </include> </launch>
- Modify darknet_ros.launch file
- jetson_camera
- rplidar_ros
- pointcloud_to_laserscan
- usb_cam
- Used Hardware
- Jetbot AI Advanced (made by yahboom)
- Jetson nano
- IDLE
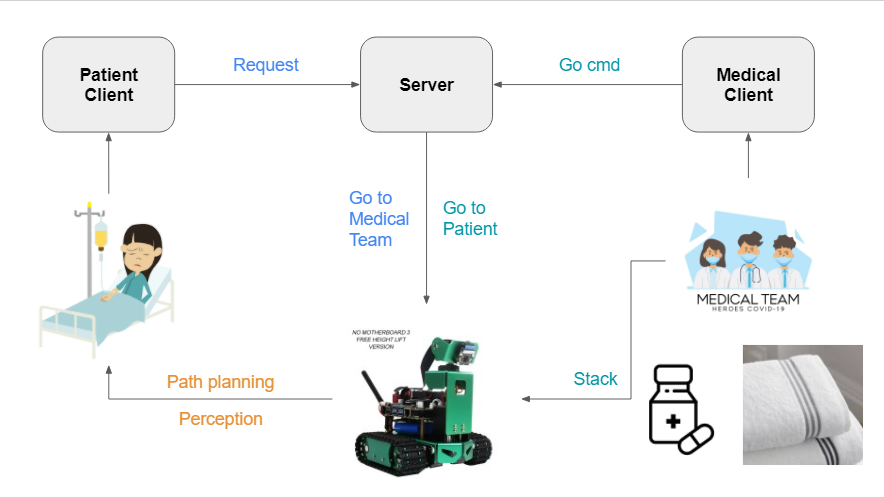
- COMMUNICATION
- Goal point 받기
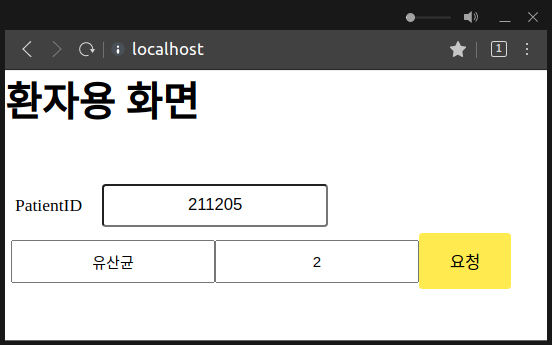
- 환자 정보 받기
- 물품 정보 받기
- 요청 결과 알리기
- 미션 수행 요청 받기
- PATH_PLANNING
- OPERATION
- MOVING (Controller)
- PAUSE
- DETECTION
- IDLE
- waiting for request from medical team
- request: goal position
- goal type
- x, y axis
- GO_TO_PATIENT
- DETECT_OBSTACLES
- CONTROL
- COMMUNICATION
- DETECT_PATIENT
- detect a patient
- visual servoing
- WAIT_FOR_RESPONSE_FROM_PATIENT
- GO_BACK_HOME
- Mission Planner
- Cartographer
- rplidar
- imu(myahrs+)
- Darknet_ros
- jetson_camera
- Motor_controller
- Servo_controller
- Communicate
- Patient -> Server
- Medical -> Server
- Server -> Robot
-
Mission Planner
- Subscriber
- Communication data
- Navigation data
- BoundingBox data
- Lidar data
- Publisher
- Motor cmd data
- Servo cmd data
- Subscriber
-
Cartographer
- Subscriber
- Imu data
- Lidar data
- Publisher
- Navigation data
- Subscriber
-
Darknet_ros
- Subscriber
- Image data
- Publisher
- BoundingBox data
- Subscriber
-
Motor_controller
- Subscriber
- Motor cmd data
- Navigation data
- Subscriber
-
Servo_controller
- Subscriber
- Servo cmd data
- Subscriber
-
std_msgs/Float32MultiArray ("/rrt/goal_point")
- data[0] = [0] Go to patient, [1] Go to home
- data[1] = targetPositionX
- data[2] = targetPositionY
-
std_msgs/Bool ("/rrt/is_taken")
- data = [False] not yet, [True] yes!!!!!!
- nav_msgs/Odometry
- darknet_ros/BoundingBoxs "/darknet_ros/bounding_boxes"
- Header header
- Header image_header
- BoundingBox[] bounding_boxes
- float64 probability
- int64 xmin
- int64 ymin
- int64 xmax
- int64 ymax
- int16 id
- string Class
- ackermann_msgs/AckermannDrive
- float32 steering_angle
- float32 steering_angle_velocity
- float32 speed
- float32 acceleration
- float32 jerk
- std_msgs/Float32MultiArray
- data[0] = panAngle
- data[1] = tiltAngle
- sensor_msgs/Imu "/imu/data_raw"
- sensor_msgs/PointCloud2 "/scan"
- sensor_msgs/Image "/usb_cam/image_raw"