| Antonello Paolino |
|---|
 |
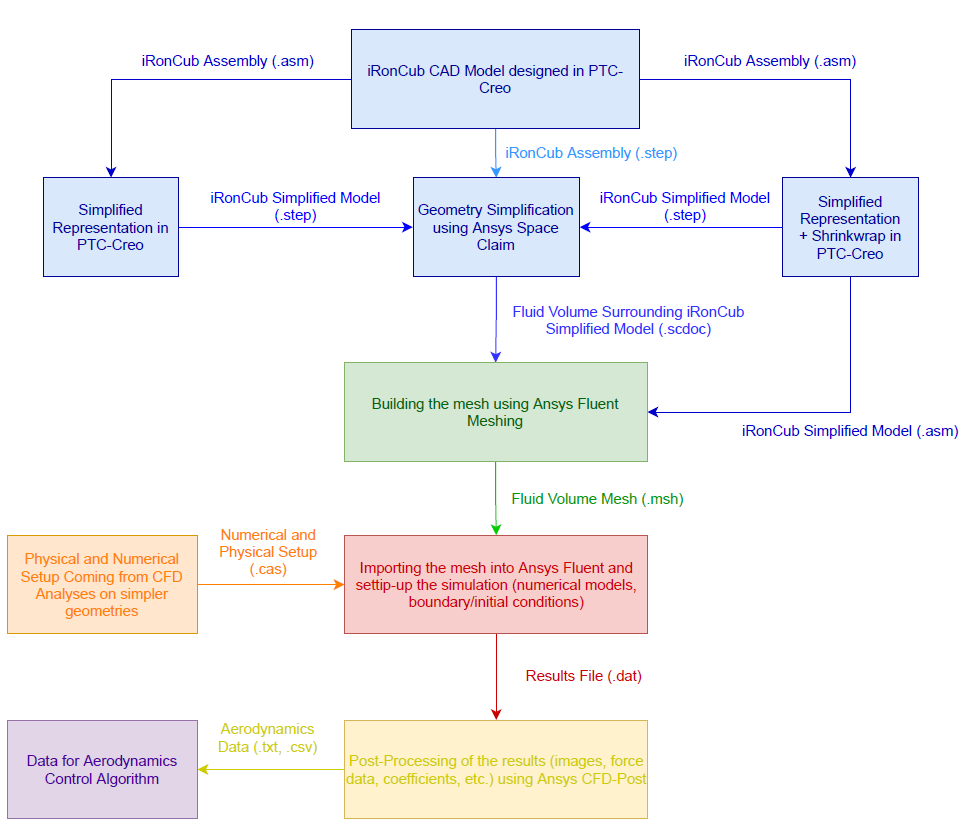
The main objective of the iRonCub project is to make a humanoid robot fly. Unavoidably, the desired flying conditions are such that the aerodynamic forces acting on the robot can't be neglected (even if they are small if compared with inertial forces). Using the software Ansys Fluent, a series of CFD simulations is going to be carried out on a very simple geometry reproducing the body shape of the robot in order to relatively easily understand the aerodynamic parameters which can influence most the flight. Meanwhile, using the exact geometry of iRonCub, a numerical workflow has to be developed for importing the CAD file of the robot, building a proper mesh on the fluid volume surrounding the robot and representing the air and then, taking advantage of the results coming from the CFD simulations on the simplified geometry, setting up the numerical and physical model for obtaining the data (i.e. the aerodynamic forces) to be included in the mathematical control model. Finally, for validating the data coming from CFD simulations, it was decided to perform a series of experiments in a Wind Tunnel using the real robot.
Using Ansys Workbench (and specifically Ansys Fluent for CFD simulations), the main objective of this project is to develop a procedure which, starting from one CAD model of iRonCub, is able to give as output the aerodynamic forces acting on it.
Once that the results coming from the first simulation have been verified, it is possible to think to implement the workflow in order to automatically get the aerodynamic forces acting on any of the flying positions the robot can assume.
Considering one possible flying configuration of iRonCub, the implemented workflow for the CFD simulation has to give as results the aerodynamic forces acting on the robot.
The same result described in the previous item has to be achieved considering any possible configuration in which iRonCub can fly.
In order to get a simplified, but realistic model of iRonCub, it is necessary to understand which is the best procedure to achieve this goal.
This milestone is strictly related to the previous one, since it aims at finding the correct software for simplifying iRonCub geometry and at the same time to define the necessary instruments for achieving the objective.
As a first attempt, a reduced geometry composed by 2 link and 1 joint of iRonCub was simulated. It is desired to automatically get CFD results for different configurations of this reduced geometry.
This Milestone aims at simulating iRonCub in the configuration used during the Wind Tunnel campaigns in an automatic way. It can be split into smaller ones. Below the description of each one of them.
The first step to be achieved is to correctly import the CAD model of iRonCub into the workspace in which we want to develop the workflow.
Once the CAD model is imported, a proper fluid volume representing the air which surrounds iRonCub has to be built and then meshed.
The characteristics of the materials involved in the simulation, the numerical methods and the boundary/initial conditions have to be properly set in order to get a rapid convergence towards accurate results.
Implement the workflow in order to automate the process that, starting from the CAD, is able to provide aerodynamic forces.
This Milestone aims at simulating iRonCub in the configuration used during the Wind Tunnel campaigns unleashing the power of GPU computing.
The objective of this Milestone is to identify both the tools and methods for simplyfing the iRonCub-Mk3 geometry in order to perform CFD simulation in an automatic way. Specifically, we would like to conclude this Epic once we reach the maximum level of automatization that can be reached in order to perform this process.
In order to verify the results coming from CFD Simulations, it was decided to perform a test in a Wind Tunnel, specifically the one of the Politecnico di Milano (GVPM). This milestone will track all the issues related to the preparation of the robot for performing this test.
This milestone will track all the support activities requested for the Wind Tunnel Second Campaign and/or for the CFD Simulations.
Please check the file RepoContent.md for getting an accurate description of the content of this repo.